Static Reader Design Considerations
The static reader is the most open ended component of the system, and can be designed in a number of ways to best match Titan's needs.
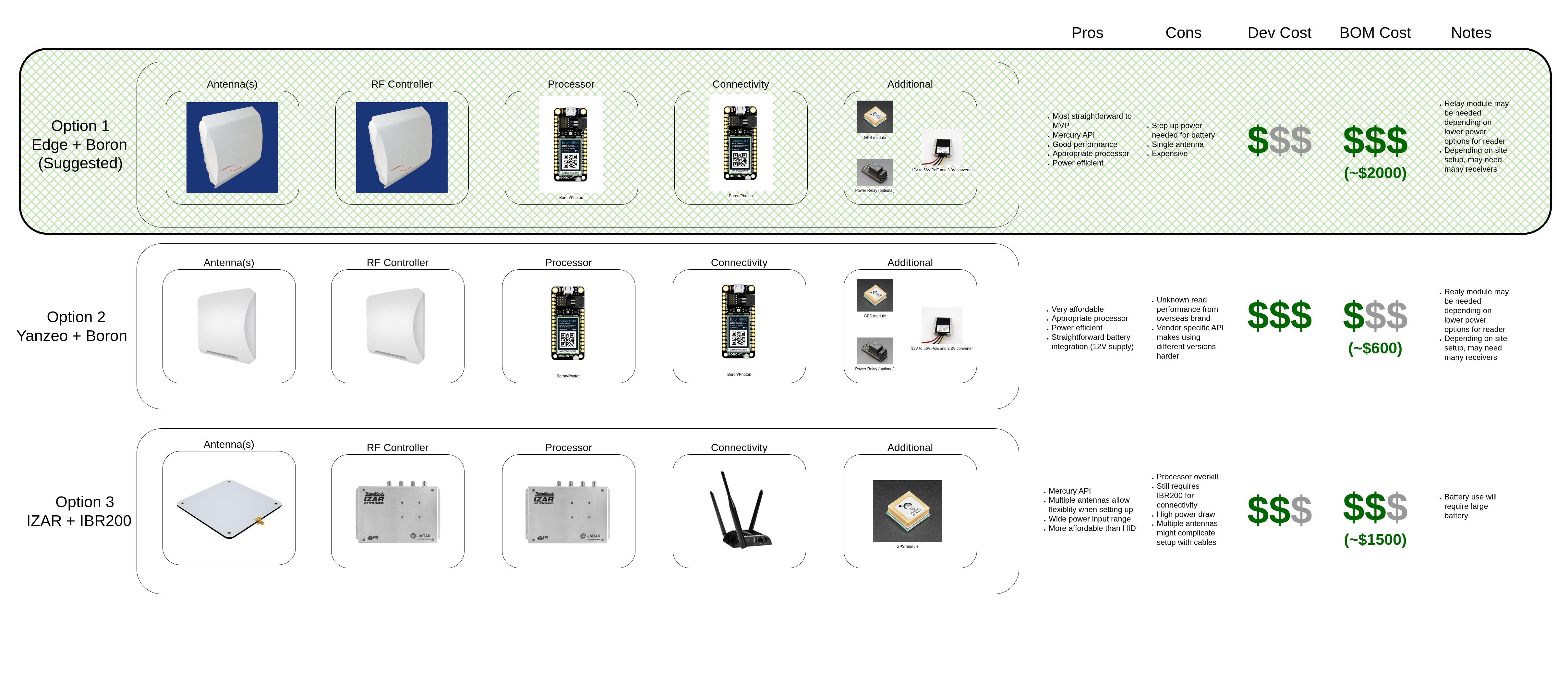
The goal of this design review is to determine the major roles that need to be filled to produce a functional reader, and provide different options that may fit different use cases.
The roles are as follows
- Antenna
- RF Controller
- Processor
- Connectivity Link
- Power
- Accessories
A selection of options are presented below. More detailed information can be found at Static Reader Configuration Options
Antenna
Antennas are specially made to match the frequency range of the RFID tags (860-960 MHz). Most of them are also directional, which means they provide gain. This is typically about 3-7 dBi. This value is added to the transmit power of the RF controller when determining the theoretical read range. This comes at the cost of only reading tags are are in the cone of directionality of the antenna.
Some antennas are directly integrated with a reader, while others are simple passive components that need to be paired with a RF Controller to do anything.
RF Controller
The RF controller attaches to the antenna and does the complex modulating and demodulating of the UHF radio waves that are used to power and communicate with the RFID tag.
Some readers are integrated directly with an antenna (such as the Edge 30R+) or they can have one or more antenna ports, which need to be connected to separate antennas to function.
The controller will expose a set of RF parameters that can be adjusted to best fit the use case. Examples include:
- How often to read
- What frequency to read at
- How much power to send to the antenna(s)
- What data is read
- Cooldowns on repeated detection of same tag
- Output type of the read tag (Weigand, AutoID)
To control these parameters, the RF controller manufacturer will provide a SDK or other documentation that show how to structure messages so that the RF controller understands them.
Processor
The processor performs the business logic of the device. A subset of it's functions are:
- Communicate with the RF controller and set the desired parameters via the RF controller SDK
- Handle tag information read by the RF controller and store it locally in memory until it can be uploaded
- Communicate with the outside world and send the read data to the storage endpoint.
- Control any additional accessories (e.g., GPS, power relay, battery charge level sensor, etc)
Some processors can be integrated directly with the RF controller, such as the ThingMagic IZAR. Others like the Edge 30R+ need to talk to an external processor
Connectivity Link
To enable the processor to communicate with the outside world, a connectivity link needs to be provided. This will primarily be one of two options:
- Cellular
- WiFi
Additional Options include:
- Ethernet
- LoRA-WAN
- Z-Wave
- Zigbee
The processor will send data to the connectivity link, which will then send it to the internet for eventual delivery to the storage endpoint.
Some processors will have a connectivity link already in them (e.g., the Boron has a cellular modem installed on it). Others will need to have an external device thats used to bridge the processor to the internet.
Power
The reader will need a power source. The ideal option would be a small battery with solar panel. Some versions of components above draw more power than others and may limit the feasibility of battery operation.
Accessories
Additional accessories will likely be useful or required to improve the quality of the data, or improve the performance of the static reader. This may include:
- GPS module - locate the reader at a location
- Power Relay - Enable/disable sub-components of the reader to enable lower power modes
- Battery Sensor - Monitor health of a battery, if connected
- Screen - Display information for diagnostics